#include <ModbusRtu.h> #define ID 1 //slave ID #define TXEN 2 //pin tx enable RS485 #define PS 0 //port serial 0,1,2,3 (1-3 for mega 2560, uno 0 only) Modbus slave(ID, PS, TXEN); uint16_t au16data[9]; // jumlah address yang dibuat
hari ini saya akan share tentang cara membuat monitoring online berbasis Internet Of Things, riset kali ini saya menggunakan power meter merk schneider PM2120 dapat pinjaman dari warga Bontang yang mempunyai pabrik pupuk kaltim. sebut saja Mr. W.
oprek ini berawal dari ide ketika gimana caranya membangun sistem monitoring tanpa memikirkan server master. akhirnya ketemu aplikasi Blynk yang bisa di download di play store. aplikasi ini Free tetapi hanya menyediakan cuma sedikit energy, kamu juga bisa nambah energy tersebut dengan membeli via playstore pakai pulsa atau kartu kredit.
langsung saja apa saja yang dibutuhkan:
1. arduino mega/uno ( yang dipakai riset kali ini mega , mumpung musim kampanye sapa tahu dapat komisi dari partai)
2. kabel LAN
3. Ethernet shield
4. Kabel data buat upload arduino IDE
5. Shield RS485 kalo gak ada pakai TTL to RS485 (cara penyambungan bisa d lihat di artikel saya sebelumnya)
6. PM2120 (boleh pinjam tetangga sebelah atau pak lurah terdekat)
langkah -langkah:
1. upload koding dibawah ini (koding dibawah hanya contoh pengambilan data tegangan):
{
koding riset ini hasil perkawinan example simplemodbusmaster dengan example blynk yang ethernet
2. sambungkan shield rs485 dengan PM2120,
3. pasang ethernet shield, dan shield RS485 di arduino mega.
4. sambungkan kabel lan to laptop (posisi laptop konek dengan wifi, share koneksi wifi di port LAN)
selamat berkreasi. apabila ada yang kurang jelas bisa bertanya pada grup modbus arduino atau WA saya (081555305255)
artinya di atas adalah arduino memanggil slave ID 1, function HOLDING REGISTER, start addres 48 , lenghtnya 6, start mapping di void loop arduino dimulai dari regs 0
sekian share kali ini semoga bermanfaat.
jangan lupa meninggalkan comment
bila ada yang kurang jelas silahkan menghubungi 081555305255
langsung aja saya share dari hasil riset pertama kali membuat line follower yang mudah tanpa ribet.
awal mula riset membikin itu berawal dari saya membeli komponen shield motor nodemcu dan board nodemcu amica. kemudian saya belikan 2 buah roda + gearbox. lalu saya bikin kontrol via blynk sudah sukses,
'lanjjut kontrol via aplikasi hp sudah sukses....
akhirnya penasaran membuat line follower. kemudian saya membeli sensor line follower (sensor infrared).
void setup() { // put your setup code here, to run once: pinMode(pwm_A, OUTPUT); // PMW A pinMode(pwm_B, OUTPUT); // PMW B pinMode(dir_A, OUTPUT); // DIR A pinMode(dir_B, OUTPUT); // DIR B pinMode (14, INPUT); pinMode (12, INPUT); }
void loop() {
int lsensor = digitalRead(14); int rsensor = digitalRead(12);
// Declaration of motors pinMode(pwm_A, OUTPUT); // PMW A pinMode(pwm_B, OUTPUT); // PMW B pinMode(dir_A, OUTPUT); // DIR A pinMode(dir_B, OUTPUT); // DIR B pinMode(LAMPU, OUTPUT); // LAMPU
// Start Server server.on("/", HTTP_GET, handleRoot); server.begin();
}
void loop() { server.handleClient(); }
setelah selesai upload
2. rangkai motor ke shield motor dan tancapkan nodemcu ke shield motor
oprek kali ini tentang sebuah mobil pull back atau bahasa jowonya TARIK MUNDUR.
ada mainan anak saya yang sudah rusak.
saya mencoba untuk meng upgrade menjadi mobil yang KECE dan KEKINIAN bisa dikendalikan dari manapun berada.
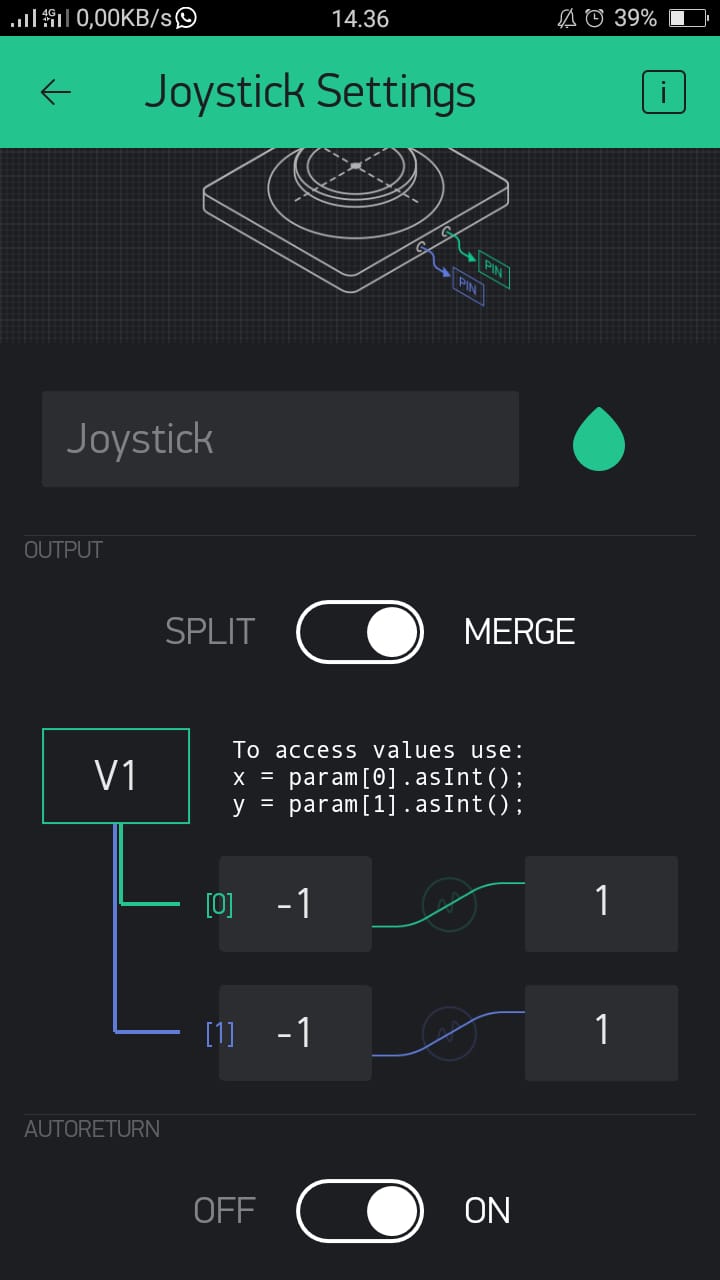
// Handling Joystick data
BLYNK_WRITE(V1){
int x = param[0].asInt();
int y = param[1].asInt();
if(x==-1 && y==0){ //Left Turn
digitalWrite(PWMA, 450);
digitalWrite(DA, HIGH);
cara menggunakan MySCADA versi android:
instal aplikasi myscada di Hp (download di playstore)
instal software myDesigner
run mydesaigner -> new project-> buat HMI -> project -> project -> download to device
run myscada di HP -> klik pojok atas -> pilihproject -> klik add
saat download project dari pc to hp posisi layar hp seperti di bawah ini
share artikel kali ini tentang koneksi modbus nodemcu, kondisi sebelumnya nodemcu modbus hanya sebagai slave aja koneksinya.
kali ini nodemcunya sebagai Acces point,
jadi ketika ingin koneksi dengan alat yang mau di monitor maupun di kontrol d modbusnya harus koneksi ke wifi dulu
kali ini bisa konek langsung k alat tersebut
syaratnya:
segmen ip di nodemcu ketika sebagai AP 192.168.1.1
maka di nodemcunya harus sama 192.168,1,1
pm710 adalah power meter digital yang memiliki protocol modbus rtu dengan port komunikasi RS485. PM ini memiliki 2 type data yaitu float dan integer.
ditempat kerja saya yang sekarang banyak sekali power meter jenis ini. yang mana gatewaynya sering mengalami hang. sehingga data yang tampil di HMI master station tidak update.
akhirnya saya menggunakan sebuah mikrokontroller yang supper canggih yaitu Arduino Uno sebagai gatewaynya dari PM tersebut. pertama kali saya trial ini di kantor dengan PM spare 3 jam oprek tidak ada hasil. akhirnya saya nyerah, saya masukin ke dalam tas kerja dan saya bawa pulang.
sampai di rumah masih penasaran kenapa kok nggak mau di baca, padahal pakai usb to rs485 normal tanpa masalah. langkah pertama:
1. coba mengganti shield rs485, tapi masih belum ada hasil sampai ganti 5x kalo nggak salah
2. ganti mikrokontroller arduino. alhamdulillah ada hasil.
coba tanya" di grup WA modbus arduino arduino yang saya pakai ada kesalahan cetak arduino mega black clone salah serial. tapi saya nggak mau ambil pusing. arduinonya saya lelang dengan harga 2rb.
karena shield rs485 hanya cocok di port serial 0.
hari telah tiba senin tanggal 21 mei 2018. saya mencoba untuk memasang di GI Krian dengan membaca beberapa parameter seperti:
1. tegangan
2. daya
3. arus
4. frekwensi
dengan total 10 power meter.
pada saat mencoba implementasi, ada kesulitan yaitu mengecek ID, baudrate, parity. karena tampilan angkanya kurang sempurna (cek gambar di atas). tapi alhamdulillah ada 1 PM yang angkanya yang agak sempurna dan sudah diketahui ID, parity dan baudratenya.
setelah itu cek arus per masing" feeder. kemudian kabel rs485 yang di panel gateway saya lepas. saya cek satu persatu IDnya. alhamdulillah sudah ketemu semua.
dan sekarang sudah bisa dipantau dari master station 10 power meter tersebut. register addres pm710
modul simor mini ini adalah modul buat belajar RTU dalam sistem SCADA, modul ini support arduino mega 2560/UNO, dan ethernet shield.
modul ini memiliki:
2 Digital Output (Dry Contact)
2 Digital Input (5-24V)
2 Analog Input (0-5V)
2 Analog Output (pwm 0-255)
1 Port rs485
2 Port I2C
modul ini bisa buat belajar protocol modbus slave maupun master.
dengan sebagai modbus master, bisa melakukan read/write modul modbus slave seperti:
1. Power meter (contoh yang sudah teruji: PM800, PM5110
2. Relay Proteksi (contoh yang sudah di uji: micom p127, vamp40)
3. PLC
pertama select protocol dulu
File-> selec protocol
terus properties -> protocol spesific
pilih di exchange list read multiple register buat lihat data di holding register (modbus)
pilih view -> point value untuk melihat nilai dari analog input atau digital input
tekan simulate master
pilih view -> digital control untuk control (modbus - coil status)
saat coba control.. pilih send once bukan simulate master
pilih view -> digital control untuk control (modbus - coil status)